駅の近くや学校の自転車置き場などで自転車を盗まれたことはないでしょうか.盗まれた自転車が少し離れたところで見つかることもあるでしょう.盗んだ人はその自転車をずっと使おうとするのではなく,ちょっと「借りる」ような感じで,自転車を盗んでいるのでしょうかね.全く腹立たしいことです.ではなぜ,こうした自転車泥棒はできるのでしょうか.今回は運動の学習という観点から考えてみたいと思います.
私たちの運動が時間をかけて練習し,身につけてきたものだということはすでにお話ししました.下の図を見てください.今から150年近く前の研究ですが,テレグラフと呼ばれるモールス信号のような符号を通信するための作業員の学習過程を調べたものです.送信事態というのはこちらから符号を送ることで,受信事態というのは相手からの符号を読み取ることです.送信事態では練習を始めてから順調に上達しているのがわかると思います.他方,受信事態では14週ぐらいから25週ぐらいまでにかけて停滞しているのがわかるでしょう.ちょうど本線での最低送受信率という,実際に現場で働けるかどうかの基準の少し手前です.送信事態では8週目ですでにこの基準をクリアしているのですが,受信事態では25週ぐらいまでかかっています.つまり,受信事態ではあと少しで基準をクリアするという手前で足踏みをしているのです.これが高原現象(プラトー)と呼ばれるものです.ではなぜ,送信事態では見られなかった高原現象が受信事態でのみ見られたのでしょうか.それは,送信事態というのは自分のペースで符号を送ることができるのですが,受信事態では相手のペースで送られてくる符号を読み取らないといけないのです.つまり送信事態は能動的,受信事態は受動的と言えます.つまり,相手がある場合には伸び悩み停滞する時期が見られるということで,壁があるともいえるでしょう.スポーツでも,地区大会では勝てても,県大会では勝てないということがあるでしょう.要は,相手が変われば,これまでのやり方では通用しなくなる時期が必ずあるということだとも言えます.

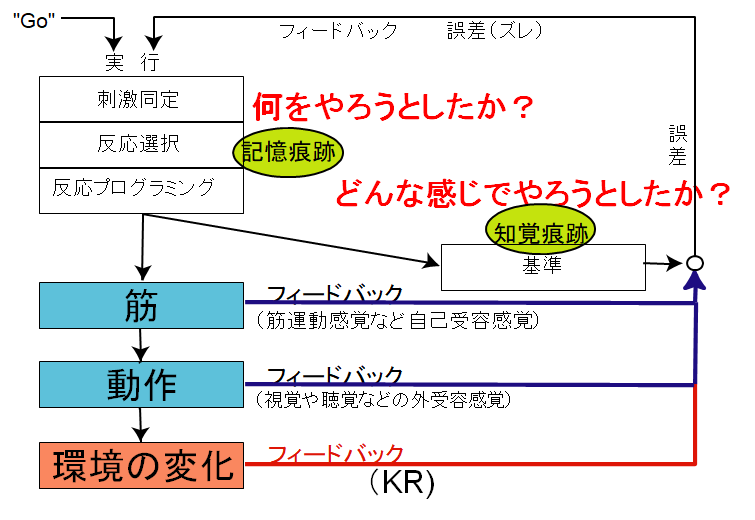
さて,運動というのは,情報を取り込み,それを処理し,そして出力していくことによって制御されているということは以前にお話ししました.では学習はどうやって進むのかというと,運動の制御と同じように出力した結果をフィードバックしながら学習は進みます.バスケットボールのフリースローを思い浮かべてみてください.一回シュートを打ってもし短かったら,次は少し長めに打とうと思いますね.これがフィードバックです.下の図はAdamsという人が提唱した運動学習のモデルで,記憶痕跡(memory trace)と知覚痕跡(perceptual trace)という2つの記憶を仮定したもので閉回路理論(closed-loop theory)と言います.ここで反応(運動)を生成するための過去の記憶が記憶痕跡で,行った反応を評価するのが知覚痕跡です.つまり,何をやろうとしたかということ(記憶痕跡)と,どんな感じでやろうとしたか(知覚痕跡)という二つの記憶を用いて,実際に運動をした後にその結果と2つの記憶を比較して,その後さを少なくするように次の運動を行うというものです.したがって,自分がどうやろうとしたかということをちゃんと覚えておかないと上手くならないということです.よく「考えてやれ」と言われるのは,この2つの記憶のことを指しているとも考えられます.うまくいったかどうかを評価するためには,なんらかの基準が必要で,その基準は自分の中にあるということです.
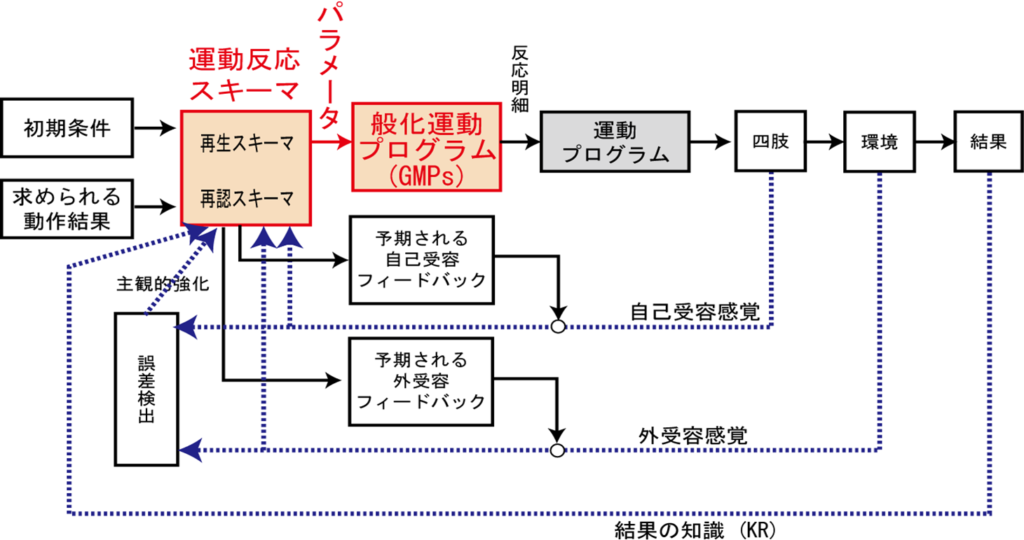
ただ,この閉回路理論では,新しいことをやる時にもいちいちこの過程を繰り返す必要があり,全ての運動を覚えるには記憶容量の問題がありますが,我々は実際にはそのような無駄はしていないように思われます.そしてこの新奇性と貯蔵の問題に対して提出されたのが,Richard A. Schmidtが提唱したスキーマ理論です.ここでは,1対1対応の記憶では容量が足りないので,スキーマ(schema)と呼ばれるデータベースのようなものを仮定しました.このスキーマには2つあり,ここで再生スキーマ(recall schema)とは,パラメータの値と実行結果との関数関係に関する知識データベースで,再認スキーマ(recognition schema)とは,実行された結果を評価するために過去の運動結果と運動に伴う感覚との法則に関する知識データベースで,閉回路理論の記憶痕跡と知覚痕跡に相当するものです.そして,獲得したスキーマを使って,般化運動プログラム(generalized motor program)とそれにパラメータ(parameter)を与えるのを運動プログラミング(motor programming)と呼びました.般化運動プログラムとは,「投げる」や「打つ」といったものだと思ってください.
ではスキーマとはどういったものでしょうか.下の図を見てください.横軸が反応明細におけるパラメータで,例えば投げる時の力の大きさだと思って下さい.縦軸はその動作結果で,ボールを投げた距離です.つまり,どれくらいの力でボールを投げると,どれくらいボールが飛ぶかという関係をスキーマと呼んでいます.こうしたスキーマが獲得できると,目標値(縦軸の緑の丸)があるときに,どのくらいの力を発揮すればよいかというパラメータ(横軸の白抜きの緑)がわかるということです.

つまり,私たちは一つ一つの運動を覚えているのではなく,こうした般化運動プログラムとそれに関するスキーマ(パラメータと動作結果の関係),を覚えていると考えるのです.すると,今までに実際には投げたことのない距離でもそのための力の出し方(パラメータ)がわかるので,思ったところに投げることができるというものです.
これで,自転車泥棒ができる理由です.これまでにのったことのない自転車,つまりサドルの高さも違えば,ハンドルの形が違っていても,自転車はこうやって乗るというスキーマを獲得しているので,自分の自転車以外の自転車でも乗れてしまうのです.もしこうしたスキーマが獲得されないならば,自分の自転車以外は乗ることができなくなり,自転車泥棒はできないことになります.