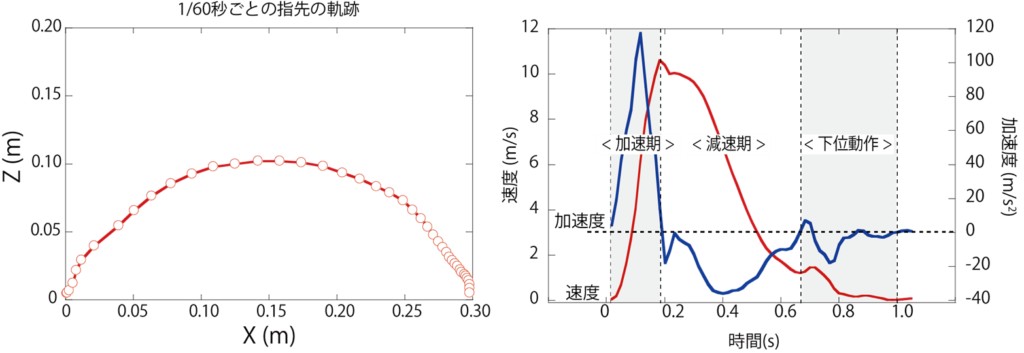
これまでに,モノをつかむ運動を例にとり,運動の制御の仕方を説明してきました(#01).また,ヒトをコンピュータに見立てて,フィードバック制御の話をしました(#04).しかし実際には,ものをつかむ動作も詳細に見ていくと,2つの制御が行われていることがわかります.下の図を見てください.30cm先のモノをつかむ動作を実際にビデオで撮影し横から見たように書いたのが左の図です.縦軸は高さなので,最大で10cぐらいの高さまで手が上がっているのがわかります.そして,右の図がこの運動の速度(赤線)と加速度(青色)を求めてその時間変化を示した図です.だいたいベル(釣り鐘)型の速度を示しています.しかしよく見ると,0.6秒を過ぎたところで,もう一度速度が上昇しているのがわかります.前にも説明した通り,加速度が正の値の部分はアクセルを踏んでいる時です(図中の「加速期」).そして加速度が負の部分はブレーキを踏んでいる時です(図中の「減速期」),それが0.6秒過ぎでもう一度加速度が正の値を示し,わずかですが,再度アクセルを踏んでいるのがわかるでしょう.これ以降の部分が「下位動作」と呼ばれる部分で,モノをつかむための微調整をしているところです.そして,この下位動作までの部分は「初期制御動作」とよばれ,「弾道運動 (ballistic movement)」とも呼ばれます.
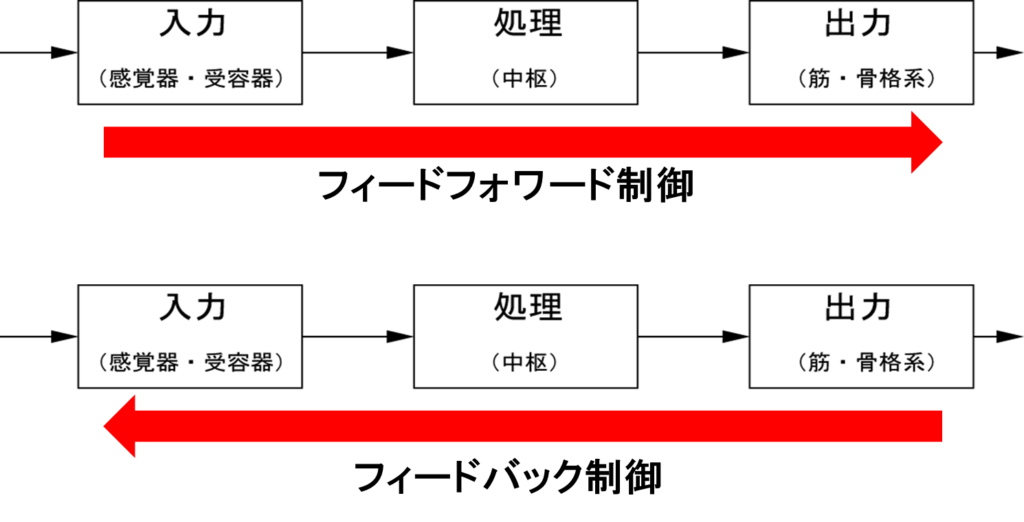
つまり,我々はモノをつかむ運動を行う時に2種類の制御方式を使っているのです.それがフィードフォワード制御(開回路制御)とフィードバック制御(閉回路制御)です.フィードフォワード制御は,下の図のように入力から処理,出力へと一方通行です.最初にこうやろうと決めた通りに運動を行う制御で,プリプログラム制御 (pre-programmed control)といわれます.したがって,回路として開いているので開回路制御,弾道運動とも呼ばれるのです.弾道ミサイルというのは,最初に目標を決めて,プログラムをして,プログラム通りに飛んでいくミサイルです.いったん飛び出すと,もう入力は受け付けず,最初に決められた通り,動くだけです.しかし,このフィードフォワード制御だけでは,正確にモノをつかむことはできません.目標とするモノに近づいたら,微調整が必要になるのです.そこで必要とされるのが,フィードバック制御です.こちらはモノとの距離やモノの形状などの情報を受け付けながら,それに合わせた運動をしていくので,回路が閉じているので閉回路制御と呼ばれるのです.つまり,まずは大まかに動いておいて,最後に帳尻合わせをする感じです.これは,フィードフォワード制御だけでは雑になり過ぎてうまくいかないことがあるし,かといって最初から最後までフィードバック制御をしていたら常に入力を受け付けなければならず,処理に大きな負担がかかってしまいます.上手に手を抜いているということです.
ただし,全てが意識しながらこのフィードバック制御をしているわけではないようです.意識に上らないフィードバック制御もあることが知られています.潜在的視覚ー運動応答と呼ばれるもので,意識しながら(刺激を見てそれに反応する)行う運動よりもあはるかに短い時間(超短潜時)でのフィードバック機構もあるようです.
いずれにせよ,運動が上手くなるということは,このフィードバック制御を使いながら丁寧にやっていた運動を,できるだけフィードフォワード制御で労力をかけずにちゃんと目的を達成できるようになる過程ともいえます.